Modulation er en ikke-lineær elektrisk proces, hvor parametrene for et signal (bærebølge) ændres ved hjælp af et andet signal (modulering, information). Inden for kommunikationsteknologi er frekvens-, amplitude- og fasemodulation meget brugt. Inden for kraftelektronik og mikroprocessorteknologi er pulsbreddemodulation blevet udbredt.
Indhold
Hvad er PWM (Pulse Width Modulation)
Med pulsbreddemodulation af det originale signal forbliver amplituden, frekvensen og fasen af det originale signal uændret. Varigheden (bredden) af den rektangulære puls kan ændres under påvirkning af informationssignalet. I den engelske tekniske litteratur er det forkortet som PWM - pulsbreddemodulation.
Hvordan PWM virker
Det pulsbreddemodulerede signal dannes på to måder:
- analog;
- digital.
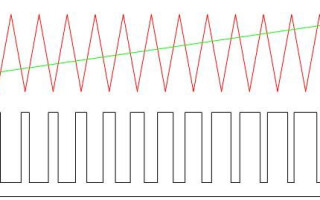
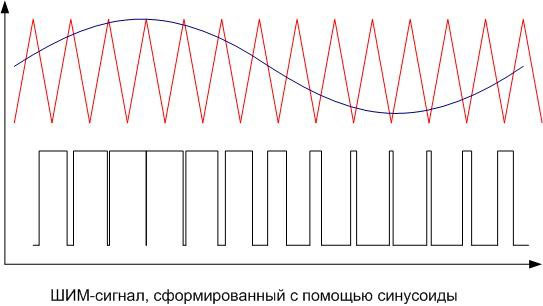
Med den analoge metode til at skabe et PWM-signal føres en bærer i form af et savtand eller trekantet signal til en inverterende komparator input, og information - om ikke-invertering. Hvis det øjeblikkelige bærebølgeniveau er højere end det modulerende signal, er udgangen af komparatoren nul, hvis lavere - en. Udgangen er et diskret signal med en frekvens svarende til frekvensen af bæretrekanten eller saven, og en pulslængde proportional med niveauet af den modulerende spænding.
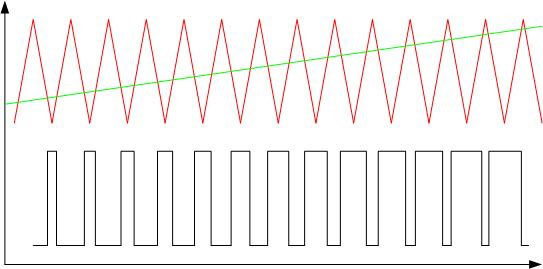
Som et eksempel er pulsbreddemodulationen af et trekantet signal lineært stigende. Varigheden af udgangsimpulserne er proportional med niveauet af udgangssignalet.
Analoge PWM-controllere er også tilgængelige i form af færdige mikrokredsløb, inde i hvilke en komparator og et bæregenereringskredsløb er installeret. Der er indgange til at tilslutte eksterne frekvensindstillingselementer og levere et informationssignal. Et signal fjernes fra udgangen, der styrer kraftige fremmednøgler. Der er også input til feedback - de er nødvendige for at opretholde de indstillede kontrolparametre. Sådan er for eksempel TL494-chippen. Til tilfælde, hvor forbrugerens effekt er relativt lille, er PWM-controllere med indbyggede nøgler tilgængelige. Den interne nøgle i LM2596 mikrokredsløbet er designet til strøm op til 3 ampere.
Den digitale metode udføres ved hjælp af specialiserede mikrokredsløb eller mikroprocessorer. Pulslængden styres af det interne program. Mange mikrocontrollere, inklusive den populære PIC og AVR, har et indbygget modul til hardwareimplementering af PWM "ombord", for at modtage et PWM-signal, skal du aktivere modulet og indstille dets driftsparametre.Hvis et sådant modul ikke er tilgængeligt, så kan PWM organiseres udelukkende ved hjælp af software, det er ikke svært. Denne metode giver mere kraft og frihed gennem fleksibel brug af output, men bruger flere controllerressourcer.
Karakteristika for PWM-signalet
De vigtige egenskaber ved PWM-signalet er:
- amplitude (U);
- frekvens (f);
- driftscyklus (S) eller driftscyklus D.
Amplituden i volt indstilles afhængigt af belastningen. Den skal levere forbrugerens nominelle forsyningsspænding.
Frekvensen af signalet, der moduleres af pulsbredden, er valgt ud fra følgende overvejelser:
- Jo højere frekvens, jo højere kontrolnøjagtighed.
- Frekvensen må ikke være lavere end responstiden for den enhed, der styres af PWM, ellers vil der opstå mærkbare krusninger af den kontrollerede parameter.
- Jo højere frekvens, desto større koblingstab. Det skyldes, at nøglens skiftetid er begrænset. I låst tilstand falder al forsyningsspændingen på nøgleelementet, men der er næsten ingen strøm. I åben tilstand løber fuldlaststrømmen gennem nøglen, men spændingsfaldet er lille, da gennemløbsmodstanden er et par ohm. I begge tilfælde er effekttabet ubetydeligt. Overgangen fra en tilstand til en anden sker hurtigt, men ikke øjeblikkeligt. I processen med at låse op, falder en stor spænding på et delvist åbent element, og samtidig løber en betydelig strøm gennem det. På dette tidspunkt når den afsatte effekt høje værdier. Denne periode er kort, nøglen har ikke tid til at varme op væsentligt.Men med en stigning i frekvensen af sådanne tidsintervaller per tidsenhed bliver det mere, og varmetabet stiger. For at bygge nøgler er det derfor vigtigt at bruge hurtige elementer.
- Ved kørsel elektrisk motor frekvensen skal fjernes fra området, der kan høres for en person - 25 kHz og derover. For ved en lavere PWM-frekvens opstår der en ubehagelig fløjt.
Disse krav er ofte i konflikt med hinanden, så valget af frekvens er i nogle tilfælde et kompromis.
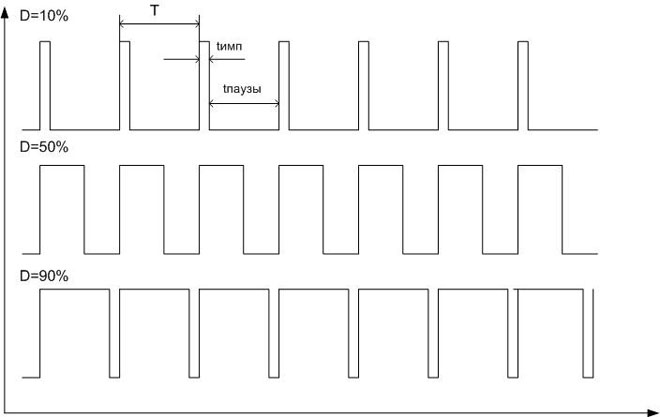
Modulationsværdien karakteriserer arbejdscyklussen. Da pulsgentagelseshastigheden er konstant, er periodens varighed også konstant (T=1/f). Perioden består af en impuls og en pause, der henholdsvis har en varighed timp og Tpauser, og Timp+tpauser=T. Driftscyklussen er forholdet mellem pulsvarigheden og perioden - S \u003d timp/T. Men i praksis viste det sig at være mere bekvemt at bruge den gensidige værdi - fyldfaktoren: D=1/S=T/timp. Det er endnu mere bekvemt at udtrykke fyldfaktoren som en procentdel.
Hvad er forskellen mellem PWM og SIR
I udenlandsk teknisk litteratur er der ingen forskel mellem pulsbreddemodulation og pulsbredderegulering (PWR). Russiske specialister forsøger at skelne mellem disse begreber. Faktisk er PWM en type modulering, det vil sige ændringer i bæresignalet under påvirkning af en anden, modulerende en. Bæresignalet fungerer som en informationsbærer, og det modulerende signal sætter denne information. Og regulering af pulsbredde er reguleringen af belastningstilstanden ved hjælp af PWM.
Årsager og anvendelser af PWM
Princippet om pulsbreddemodulation bruges i hastighedsregulatorer af kraftige asynkronmotorer. I dette tilfælde genereres det justerbare frekvensmodulerende signal (enkeltfaset eller trefaset) af en sinusbølgegenerator med lav effekt og overlejres på bærebølgen på en analog måde. Udgangen er et PWM-signal, som føres til tasterne med den nødvendige effekt. Derefter kan du sende den resulterende sekvens af impulser gennem et lavpasfilter, for eksempel gennem et simpelt RC-kredsløb, og vælge den originale sinusoid. Eller du kan undvære det - filtrering vil forekomme naturligt på grund af motorens inerti. Det er klart, at jo højere bærefrekvensen er, jo mere er udgangsbølgeformen tæt på den oprindelige sinusform.
Et naturligt spørgsmål opstår - hvorfor det er umuligt at forstærke signalet fra generatoren med det samme, f.eks. ved hjælp af kraftige transistorer? Fordi et reguleringselement, der fungerer i en lineær tilstand, vil omfordele strøm mellem belastningen og nøglen. I dette tilfælde spildes betydelig strøm på nøgleelementet. Hvis et kraftigt kontrolelement fungerer i en nøgletilstand (trinistor, triac, RGBT-transistor), så fordeles effekten over tid. Tabene vil være meget lavere, og effektiviteten vil være meget højere.
Inden for digital teknologi er der ikke noget særligt alternativ til pulsbredderegulering. Signalamplituden er konstant dér, spændingen og strømmen kan kun ændres ved at modulere bærebølgen langs pulsbredden og efterfølgende beregne et gennemsnit. Derfor bruges PWM til at regulere spænding og strøm på de objekter, der kan gennemsnitligt pulssignalet. Midling sker på forskellige måder:
- på grund af belastningsinerti.Den termiske inerti af termoelektriske varmelegemer og glødelamper tillader således, at de regulerede objekter ikke mærkbart afkøles i pauserne mellem impulserne.
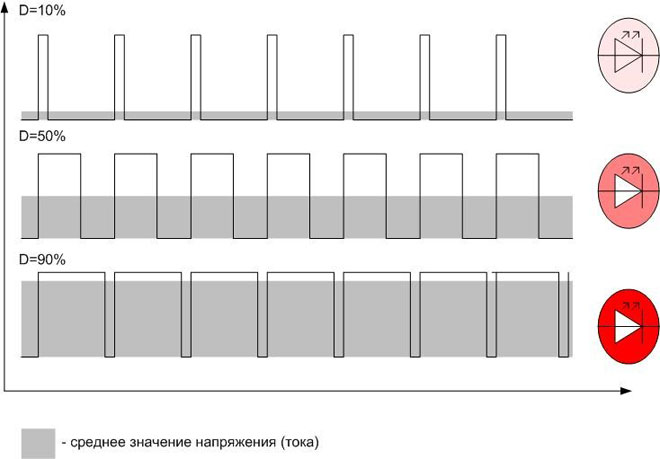
- På grund af perceptionens inerti. LED'en har tid til at gå ud fra puls til puls, men det menneskelige øje bemærker ikke dette og opfatter det som en konstant glød med varierende intensitet. Dette princip bruges til at kontrollere lysstyrken af prikker på LED-skærme. Men umærkelig blink med en frekvens på flere hundrede hertz er stadig til stede og forårsager øjentræthed.
- på grund af mekanisk inerti. Denne egenskab bruges til styring af børstede DC-motorer. Med en korrekt valgt reguleringsfrekvens når motoren ikke at bremse i døde pauser.
Derfor bruges PWM, hvor gennemsnitsværdien af spænding eller strøm spiller en afgørende rolle. Ud over de nævnte almindelige tilfælde regulerer PWM-metoden gennemsnitsstrømmen i svejsemaskiner og batteriopladere mv.
Hvis naturlig gennemsnitsberegning ikke er mulig, kan denne rolle i mange tilfælde overtages af det allerede nævnte lavpasfilter (LPF) i form af en RC-kæde. Til praktiske formål er dette nok, men det skal forstås, at det er umuligt at isolere det originale signal fra PWM ved hjælp af et lavpasfilter uden forvrængning. PWM-spektret indeholder trods alt et uendeligt antal harmoniske, der uundgåeligt vil falde ind i filterets pasbånd. Derfor bør man ikke opbygge illusioner om formen af den rekonstruerede sinusoide.
Meget effektiv og effektiv PWM RGB LED-styring. Denne enhed har tre p-n-kryds - rød, blå, grøn.Ved at ændre lysstyrken af gløden for hver kanal separat, kan du få næsten enhver farve på LED-gløden (med undtagelse af ren hvid). Mulighederne for at skabe lyseffekter med PWM er uendelige.
Den mest almindelige anvendelse af et pulsbreddemoduleret digitalt signal er at styre den gennemsnitlige strøm eller spænding, der strømmer gennem en belastning. Men ikke-standard brug af denne type modulering er også mulig. Det hele afhænger af udviklerens fantasi.
Lignende artikler: