En sensor i generel forstand er en enhed, der konverterer en fysisk mængde til en anden, praktisk til behandling, transmission eller efterfølgende konvertering. Som regel er den første størrelse fysisk, ikke egnet til direkte måling (temperatur, hastighed, forskydning osv.), og den anden er et elektrisk eller optisk signal. En niche inden for måleinstrumenter er optaget af sensorer, hvis hovedelement er en induktor.
Indhold
Hvordan induktanssensoren virker, og hvordan den virker
Ifølge driftsprincippet er induktive sensorer aktive, det vil sige, at de kræver en ekstern generator for at fungere. Det giver et signal med en given frekvens og amplitude til induktoren.
Strømmen, der passerer gennem spolens vindinger, skaber et magnetfelt. Hvis et ledende objekt kommer ind i magnetfeltet, ændres spolens parametre.Det er kun tilbage at rette denne ændring.
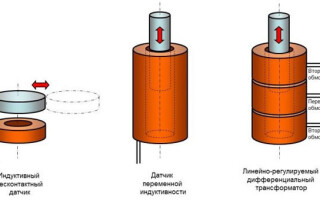
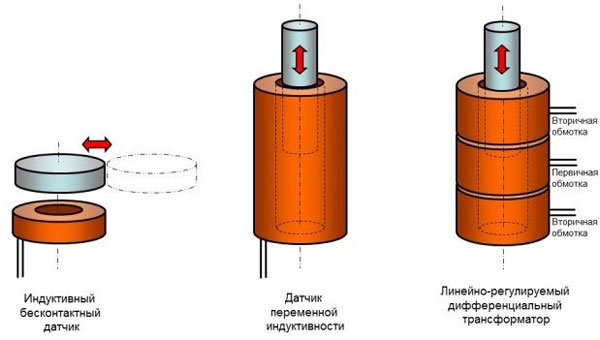
Simple berøringsfri sensorer reagerer på udseendet af metalgenstande i viklingens nærzone. Dette ændrer spolens impedans, denne ændring skal konverteres til et elektrisk signal, forstærke og (eller) fikse passagen af tærsklen ved hjælp af et sammenligningskredsløb.
Sensorer af en anden type reagerer på ændringer i den langsgående position af det objekt, der tjener som spolens kerne. Når objektets position ændres, bevæger det sig ind eller ud af spolen og ændrer derved dens induktans. Denne ændring kan konverteres til et elektrisk signal og måles. En anden version af en sådan sensor er, når et objekt nærmer sig spolen udefra. Dette får induktansen til at falde på grund af jordeffekten.
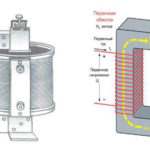
En anden version af den induktive forskydningssensor er en lineært justerbar differentialtransformator (LVDT). Det er en kompositspole, lavet i følgende rækkefølge:
- sekundær vikling 1;
- primær vikling;
- sekundær vikling 2.
Signalet fra generatoren føres til primærviklingen. Det magnetiske felt skabt af mellemspolen inducerer en EMF i hver af de sekundære (transformator princip). Kernen, når den bevæger sig, ændrer den indbyrdes forbindelse mellem spolerne, hvilket ændrer den elektromotoriske kraft i hver af viklingerne. Denne ændring kan rettes af målekredsløbet. Da kernens længde er mindre end den samlede længde af den sammensatte spole, kan objektets position entydigt bestemmes af EMF-forholdet i sekundærviklingerne.
På samme princip - en ændring i den induktive kobling mellem viklingerne - er der bygget en drejesensor.Den består af to koaksiale spoler. Signalet påføres en af viklingerne, EMF i den anden afhænger af den gensidige rotationsvinkel.
Ud fra driftsprincippet er det indlysende, at induktive sensorer, uanset design, er berøringsfrie. De arbejder på afstand og kræver ikke direkte kontakt med det kontrollerede objekt.
Fordele og ulemper ved induktive sensorer
Fordelene ved induktive sensorer omfatter primært:
- design pålidelighed;
- mangel på kontaktforbindelser;
- høj udgangseffekt, som reducerer indflydelsen af støj og forenkler kontrolkredsløbet;
- høj følsomhed;
- evnen til at arbejde fra kilder til vekselspænding af industriel frekvens.
Den største ulempe ved induktive sensorer er deres størrelse, vægt og fremstillingskompleksitet. Til vikling af spoler med de givne parametre kræves specialudstyr. Også behovet for nøjagtigt at opretholde amplituden af signalet fra masteroscillatoren betragtes som et minus. Når det ændrer sig, ændres følsomhedsområdet også. Da sensorerne kun fungerer på vekselstrøm, bliver det et vist teknisk problem at opretholde amplituden. Direkte (eller gennem en step-down transformer) vil det ikke være muligt at forbinde sensoren til et husholdnings- eller industrielt netværk - i den kan spændingsudsving i amplitude eller frekvens endda nå 10% i normal tilstand, hvilket gør målenøjagtigheden uacceptabel .
Målenøjagtigheden kan også påvirkes af:
- tredjeparts magnetiske felter (afskærmning af sensoren er umulig baseret på princippet om dens drift);
- tredjeparts EMF pickups i forsynings- og målekabler;
- fabrikationsfejl;
- sensor karakteristisk fejl;
- tilbageslag eller deformationer på sensorinstallationsstedet, der ikke påvirker den samlede ydeevne;
- afhængighed af nøjagtighed på temperatur (parametrene for viklingstråden ændres, herunder dens modstand).
Induktanssensorernes manglende evne til at reagere på udseendet af dielektriske objekter i deres magnetfelt kan tilskrives både fordele og ulemper. På den ene side begrænser dette omfanget af deres anvendelse. På den anden side gør det den ufølsom over for tilstedeværelsen af snavs, fedt, sand osv. på de overvågede genstande.
Kendskab til manglerne og mulige begrænsninger i driften af induktive sensorer tillader rationel udnyttelse af deres fordele.
Omfang af induktive sensorer
Induktive nærhedssensorer bruges ofte som endestopkontakter. Sådanne enheder er blevet udbredt:
- i sikkerhedssystemer, som sensorer til uautoriseret åbning af vinduer og døre;
- i telemekaniske systemer, som sensorer for den endelige position af enheder og mekanismer;
- i hverdagen i ordningerne til indikation af den lukkede position af døre, skodder;
- til at tælle genstande (for eksempel at bevæge sig langs transportbåndet);
- for at bestemme gearets rotationshastighed (hver tand, der passerer sensoren, skaber en impuls);
- i andre situationer.

Vinkelkodere kan bruges til at bestemme rotationsvinklerne for aksler, tandhjul og andre roterende komponenter, såvel som absolutte encodere. Sådanne anordninger kan også bruges i værktøjsmaskiner og robotanordninger sammen med lineære positionssensorer. Hvor du skal kende præcis positionen af mekanismernes noder.
Praktiske eksempler på implementering af induktive sensorer
I praksis kan design af induktive sensorer implementeres på forskellige måder. Den enkleste udførelse og inklusion er for en to-leder enkelt sensor, som overvåger tilstedeværelsen af metalgenstande i dens følsomhedszone. Sådanne enheder er ofte lavet på basis af en E-formet kerne, men dette er ikke et grundlæggende punkt. En sådan implementering er lettere at fremstille.
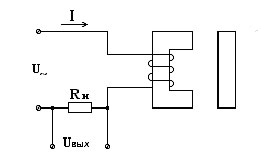
Når spolens modstand ændres, ændres strømmen i kredsløbet og spændingsfaldet over belastningen. Disse ændringer kan forpligtes. Problemet er, at belastningsmodstanden bliver kritisk. Hvis den er for stor, vil ændringerne i strømstyrken, når en metalgenstand dukker op, være relativt små. Dette reducerer systemets følsomhed og støjimmunitet. Hvis den er lille, vil strømmen i kredsløbet være stor, en mere modstandsdygtig sensor vil være påkrævet.
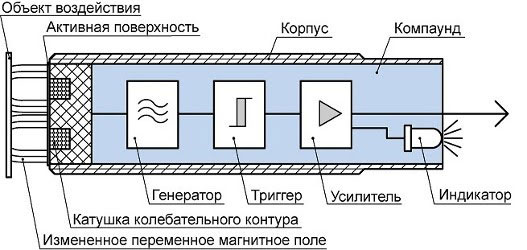
Derfor er der designs, hvor målekredsløbet er indbygget i sensorhuset. Generatoren genererer impulser, der føder induktoren. Når et bestemt niveau er nået, udløses triggeren, og skifter fra tilstand 0 til 1 eller omvendt. Bufferforstærkeren forstærker signalet med hensyn til effekt og (eller) spænding, tænder (slukker) LED'en og udsender et diskret signal til det eksterne kredsløb.
Udgangssignalet kan dannes:
- ved elektromagnetisk el solid state relæ – nul eller ét spændingsniveau;
- "tør kontakt" elektromagnetisk relæ;
- åben opsamler transistor (strukturer n-p-n eller p-n-p).
I dette tilfælde kræves der tre ledninger for at forbinde sensoren:
- mad;
- fælles ledning (0 volt);
- signal ledning.
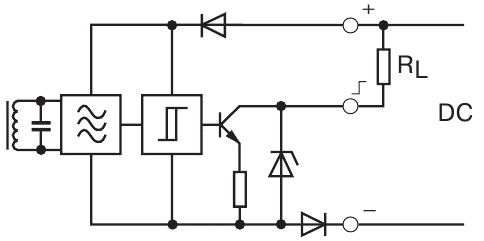
Sådanne sensorer kan også drives af DC-spænding. Impulser til induktansen de dannes ved hjælp af en intern generator.
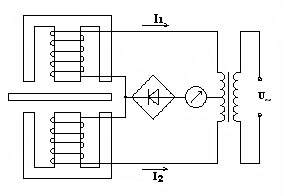
Differentialgivere bruges til positionsovervågning. Hvis det kontrollerede objekt er symmetrisk i forhold til begge spoler, er strømmen gennem dem den samme. Når en vikling forskydes mod feltet, opstår der en ubalance, den samlede strøm ophører med at være lig nul, hvilket kan registreres af en indikator med en pil i midten af skalaen. Indikatoren kan bruges til at bestemme både størrelsen af skiftet og dens retning. I stedet for en pegeanordning kan du bruge et kontrolskema, der ved modtagelse af information om en positionsændring vil afgive et signal, træffe foranstaltninger til at justere objektet, foretage justeringer af den teknologiske proces osv.

Sensorer fremstillet efter princippet om lineært justerbare differentialtransformatorer produceres i form af komplette strukturer, som er en ramme med primære og sekundære viklinger og en stang, der bevæger sig indeni (den kan være fjederbelastet). Ledninger bringes ud for at sende et signal fra generatoren og fjerne EMF fra sekundærviklingerne. En styret genstand kan fastgøres mekanisk til stangen. Den kan også være lavet af et dielektrikum - kun stilkens position har betydning for måling.
På trods af visse iboende mangler lukker den induktive sensor mange områder i forbindelse med berøringsfri detektering af genstande i rummet.På trods af den konstante udvikling af teknologi vil denne type enhed ikke forlade markedet for måleapparater i en overskuelig fremtid, fordi dens drift er baseret på fysikkens grundlæggende love.
Lignende artikler: